

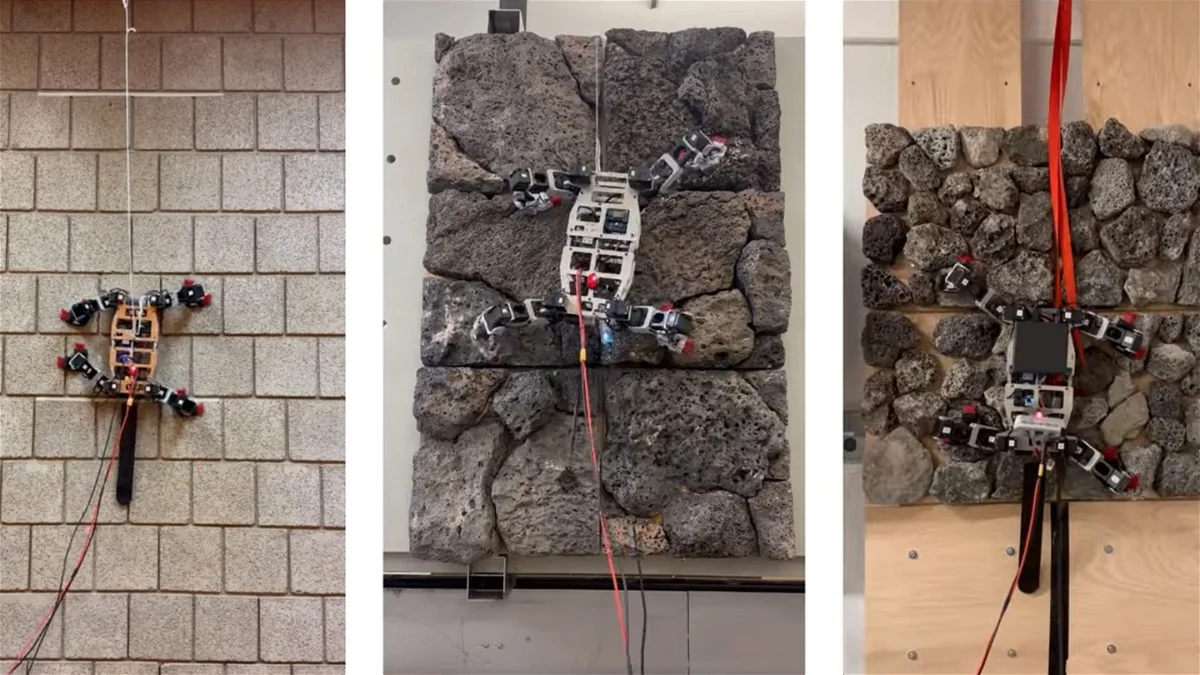
LORIS, inspirado en primates pero con un enfoque de escalada basado en insectos, es un robot escalador capaz de escalar paredes con eficacia. Su diseño único le permite adherirse a diversas superficies, imitando el agarre de los insectos. La combinación de tecnología y biomecánica ha llevado al desarrollo de este innovador dispositivo.
Un robot escalador que supera las limitaciones de los sistemas de succión
El mundo de la robótica está constantemente buscando formas más eficientes de realizar tareas. LORIS se destaca en la escalada, superando las limitaciones de los sistemas de succión tradicionales. En lugar de depender de la succión, LORIS utiliza micropinzas para aferrarse a la superficie de una pared. Esta técnica le permite adaptarse a superficies irregulares y variadas.
Los robots con sistemas de succión enfrentan dificultades al escalar superficies con irregularidades o huecos. Las pinzas de microespinas ofrecen una alternativa, pero tienen limitaciones en superficies inclinadas o con ángulos variables. En contraste, LORIS resuelve este problema mediante un diseño versátil que le permite adaptarse a diferentes tipos de paredes.
Innovación en acción: LORIS
LORIS –acrónimo de Lightweight Observation Robot for Irregular Slopes (Robot Liviano de Observación para Paredes Irregulares)– se destaca por su ligereza y versatilidad. Equipado con grupos de pinzas en cada extremidad y una capacidad de rotación, ofrece un agarre óptimo en una variedad de situaciones. Su sistema de agarre diagonal, inspirado en los insectos, le permite mantenerse estable mientras avanza verticalmente.
Finalmente, hay que decir que LORIS ha sido desarrollado por un equipo de la Universidad Carnegie Mellon, y es un ejemplo de innovación accesible. Su diseño simple y económico lo hace viable para una amplia gama de aplicaciones. Con su capacidad para escalar paredes de manera eficiente, este robot promete revolucionar campos como la construcción, la exploración y el rescate.









{kind=link}